|



|
5. 토마토 줍기 미션 1
지금부터 로봇 R1이 색이 칠해진 길을 따라가서 토마토를 줍는 미션을 수행해 보기로 해요.먼저
 버튼으로 "기본 문제 월드"의 "토마토 줍기 01" 월드를 열어봅시다.
버튼으로 "기본 문제 월드"의 "토마토 줍기 01" 월드를 열어봅시다.

|
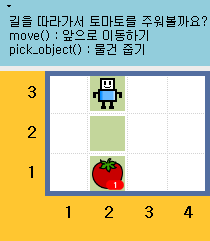
“토마토 줍기 01” 월드를 열면 오른쪽과 같은 모습으로 월드가 바뀌어요.
|
이 문제는 로봇 R1이 2칸을 앞으로 이동해서 토마토가 있는 칸에 도착한 후, 토마토를 줍는 미션이에요.
이 미션을 해결하는 데는 move()와 pick_object() 두 가지 명령어를 이용해요.
여기서 잠깐
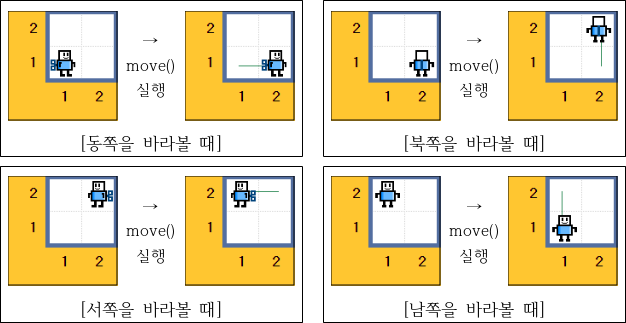
move()는 어떤 명령어일까요?
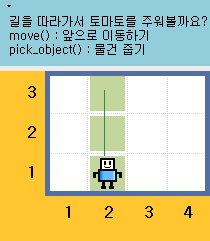
• move() : 로봇이 바라보는 방향으로 한 칸 이동할 때 사용하는 명령어입니다.
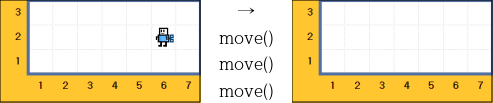
• 다음 상태에서 move()를 세 번 실행하면 어느 칸에 로봇이 도착하게 될지 그려봅시다.
• 만약 다음과 같이 로봇이 월드의 끝에 있거나 벽 앞에 있는 경우에 move()를 하면 어떻게 될까요?
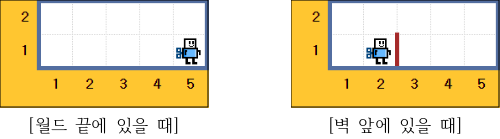
• 직접 실행해서 결과를 확인해 봅시다.
여기서 잠깐
pick_object()는 어떤 명령어일까요?
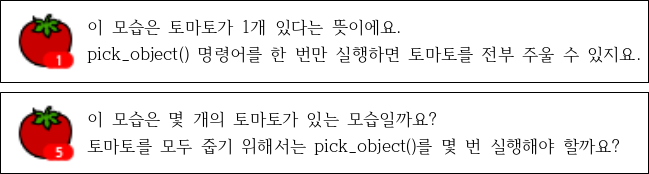
• pick_object() : 로봇이 있는 칸의 물건을 한 개 주울 때 사용하는 명령어입니다.
• 물건이 있는 칸과 물건이 없는 칸에서 pick_object()를 실행하면 어떤 차이가 있을까요?
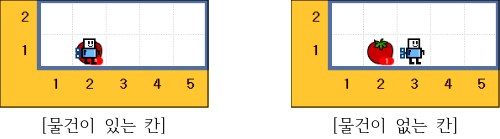
• 직접 실행해서 결과를 확인해 봅시다.
move()와 pick_object() 명령어를 이해했으니, "토마토 줍기 01" 월드로 다시 돌아가서 문제를 풀어봅시다.
아래 그림처럼 [실행 전]에서 [실행 후]로 모습이 바뀌면서 미션을 해결해야 해요.
어떤 명령어를 사용해야 하는지 순서대로 적어 봅시다.
| [실행 전] | [실행 후] | |||
|
|
-> |
|
|
정답을 맞혔나요?
 축하합니다~!
축하합니다~!문제를 푼 기념으로
 별도장을 하나 획득했습니다.
별도장을 하나 획득했습니다.(별도장을 받기 위해서는 플레이봇 회원으로 가입을 해야 해요.)
같은 방법으로 “토마토 줍기 02”를 풀고 두 번째 별도장을 받아 봅시다.
이 내용은 황병욱 선생님에 의해 작성되었습니다.
|
|